无人机飞行原理核心知识点(CAAC执照备考)
本文档为CAAC无人机执照考试「飞行原理」模块核心考点整理,覆盖大气基础、流体力学、固定翼气动特性、操纵原理、飞行稳定性等全维度内容,标注必考重点、易错点与记忆口诀,修正知识点偏差,100%适配Hexo Butterfly主题Katex公式渲染,兼顾理论学习与应试备考,可直接复制使用。
一、大气基础知识点
1.1 大气核心特性
1.1.1 空气密度规律
- 空气密度随高度增加而减小
- 空气密度与大气压力成正比,与绝对温度成反比
补充理解:温度越高,空气分子越活跃、体积膨胀,单位体积内质量越小;压力越低,空气越稀薄,两者都会导致密度下降。无人机在高原、高温环境下,需要更高转速/更大油门才能维持升力。
【CAAC补充考点】国际标准大气(ISA)海平面基准:气压101325Pa,温度15℃(288.15K),空气密度1.225kg/m³,为气动计算的标准参考条件。
1.1.2 大气层垂直分层(从低到高)
对流层 → 平流层 → 中间层 → 电离层 → 散逸层
核心考点:
- 对流层高度范围0~11km,核心特征为气温随高度升高而降低(每升高1000m,气温平均下降6.5℃),空气垂直对流强烈,天气现象复杂,绝大多数民用无人机飞行均在对流层内
- 平流层高度范围11~50km,11~20km为同温层,气温恒定-56.5℃,气流平稳、阻力小,民航客机多在平流层底部巡航
1.1.3 气体黏性特性
气体黏性随温度升高而增大
补充理解:空气黏性的本质是分子间的内摩擦阻力。温度越高,空气分子热运动越剧烈,内摩擦阻力越大,会直接增加无人机飞行的摩擦阻力。
【高频易错点】液体黏性随温度升高而减小,与气体规律完全相反,为判断题必考陷阱。
1.2 空气密度计算公式
核心公式(理想气体状态方程):
$$
\rho = \frac{P}{R \cdot T}
$$
| 符号 | 物理含义 | 单位/取值说明 |
|---|---|---|
| $\rho$ | 空气密度 | $kg/m^3$ |
| $P$ | 大气压力 | 帕斯卡(Pa) |
| $T$ | 绝对温度 | 开尔文(K),换算公式:绝对温度 = 摄氏温度 + 273.15 |
| $R$ | 干空气气体常数 | 固定值 $\approx 287\ J/(kg·K)$ |
高频易错点:
- 计算时温度必须使用开尔文(K),严禁直接代入摄氏温度(℃)
- 压力越低、温度越高,空气密度越小,无人机升力性能会显著下降
二、流体力学基础定理
2.1 连续性定理
核心公式(低速定常流动):
$$
A_1 V_1 = A_2 V_2
$$
- $A_1、A_2$:同一流管前后两个截面的面积
- $V_1、V_2$:对应截面处的气流速度
核心结论:低速定常流动的理想流体,气流速度与流管截面积成反比——流管变窄→流速加快;流管变宽→流速减慢。这是机翼上表面气流加速的核心理论基础。
【补充前提】适用条件:低速、定常、不可压缩、连续介质的理想流体。
2.2 伯努利定理
核心公式(同一流管内):
$$
P_0 = \frac{1}{2}\rho V^2 + P
$$
| 符号 | 物理含义 | 核心特性 |
|---|---|---|
| $P_0$ | 总压 | 同一流管内恒定不变 |
| $\frac{1}{2}\rho V^2$ | 动压 | 与气流速度的平方成正比,气流运动产生的压力 |
| $P$ | 静压 | 空气本身的固有压力,与动压此消彼长 |
必考核心结论:同一流管的任意截面上,动压 + 静压 = 总压 = 恒定值
- 动压增大 → 静压减小
- 动压减小 → 静压增大
易错提醒:
- 伯努利定理的适用范围:马赫数Ma<0.3的低速流动,此时空气压缩性影响可忽略,视为不可压缩流体;Ma>0.3时定理不再适用
- 机翼升力的核心来源:上表面流管收窄→流速加快→动压增大→静压降低,上下表面形成压力差,从而产生向上的升力
【补充考点】无人机空速管(皮托管)的核心原理:通过测量总压与静压的差值(动压),计算得到飞行空速。
2.3 两大定理联动逻辑
升力产生的基础逻辑:
- 连续性定理:解释「机翼上表面气流为什么更快」(机翼上表面凸起,流管有效截面积收窄)
- 伯努利定理:解释「流速更快为什么会产生升力」(流速快→动压大→静压小,上下表面形成压力差)
两者结合,构成了机翼产生升力的核心底层逻辑。
三、固定翼无人机机翼核心参数
3.1 机翼平面形状核心参数
3.1.1 机翼面积($S$)
- 定义:机翼在水平面上的投影面积(含机身遮挡部分)
- 核心影响:面积越大,可产生的升力越大,更适配载重、低速、长航时飞行场景
3.1.2 翼展($b$)
- 定义:机翼左右翼尖最外侧之间的直线距离
- 核心作用:描述机翼横向尺寸,是计算展弦比的核心参数
3.1.3 平均几何弦长与平均气动力弦长
平均几何弦长
- 定义:机翼面积与翼展的比值,代表机翼从前缘到后缘的平均宽度
- 计算公式:
$$
\text{平均几何弦长} = \frac{\text{机翼面积}S}{\text{翼展}b}
$$
平均气动力弦长(MAC)【CAAC必考】
- 定义:表征机翼气动力特性的等效弦长,是无人机重心位置、气动焦点位置的基准参考
- 核心应用:无人机重心位置用「重心到MAC前缘的距离 ÷ MAC长度」的百分数表示,为执照考试核心考点
3.1.4 展弦比($A$)
- 定义:描述机翼“细长/短粗”程度的核心参数
- 计算公式:
$$
A = \frac{b^2}{S} = \frac{b}{\text{平均几何弦长}}
$$
| 类型 | 特征 | 适用场景 |
|---|---|---|
| 大展弦比 | 机翼细长 | 滑翔机、长航时测绘无人机,巡航效率高、诱导阻力小 |
| 小展弦比 | 机翼短粗 | 高速无人机、竞速无人机,机动性强、失速迎角大、高速性能好 |
3.1.5 梯形比(尖削比)
- 定义:机翼翼尖弦长 ÷ 翼根弦长(翼根:机翼与机身连接处;翼尖:机翼最外侧)
- 核心影响:
- 比值=1:等弦平直翼
- 比值越小:机翼从翼根到翼尖收束越明显,可优化展向升力分布、降低诱导阻力
3.1.6 后掠角
- 定义:机翼特征线与机身对称面垂线之间的夹角,无特殊说明时,默认指1/4弦线后掠角
- 常见分类:前缘后掠角、1/4弦线后掠角、中弦线后掠角、后缘后掠角
- 正负定义:正角度=机翼后掠(主流设计);负角度=机翼前掠(少见)
| 类型 | 角度范围 | 适用场景 |
|---|---|---|
| 平直翼 | 后掠角<20° | 亚声速、低速长航时无人机 |
| 后掠翼 | 后掠角>25° | 高亚声速、超声速无人机 |
| 三角翼 | 前缘后掠角≈60° | 超声速无尾式固定翼无人机 |
【补充考点】后掠翼的核心作用:提高临界马赫数,延缓激波产生,降低高速飞行的波阻,提升高速飞行性能。
3.1.7 上反角与下反角
- 上反角:机翼基准面与水平面的夹角,机翼从根部向外向上翘起,核心作用是增强横向静稳定性
- 下反角:上反角为负值,机翼从根部向外向下倾斜,核心作用是降低横滚稳定性,提升操控灵活性
3.2 机翼核心气动公式
3.2.1 升力公式
$$
L = \frac{1}{2}\rho V^2 S C_L
$$
3.2.2 阻力公式
$$
D = \frac{1}{2}\rho V^2 S C_D
$$
3.2.3 升力系数公式
$$
C_L = \frac{L}{\frac{1}{2}\rho V^2 S}
$$
| 符号 | 物理含义 |
|---|---|
| $L$ | 升力 |
| $D$ | 阻力 |
| $C_L$ | 升力系数 |
| $C_D$ | 阻力系数 |
| $\rho$ | 空气密度 |
| $V$ | 相对气流速度(飞行速度) |
| $S$ | 机翼面积 |
| $\frac{1}{2}\rho V^2$ | 飞行动压 |
补充说明:翼尖涡流
有限翼展机翼的下翼面压力始终高于上翼面,下表面的高压气流会绕过翼尖流向上表面的低压区,从而形成绕翼尖的空气涡流,是诱导阻力的核心来源。
3.2.4 升力系数曲线
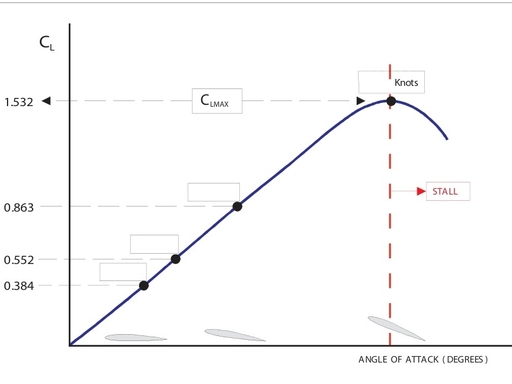
一、基本概念
升力系数($C_L$):反映机翼产生升力能力的无量纲参数,数值越大,机翼升力能力越强。
迎角($\alpha$):机翼弦线与迎面气流方向的夹角,是影响升力系数的核心变量。
二、坐标轴定义
- 横轴(X轴):迎角 $\alpha$(单位:°)
- 纵轴(Y轴):升力系数 $C_L$
三、曲线各阶段解析
-
负迎角阶段:迎角小于 0°,升力系数为负值,机翼产生负升力(向下的力)。
-
线性增长阶段:迎角从 0° 增加至临界迎角前,升力系数与迎角呈线性正相关。
迎角越大,升力系数越大,该区间为飞机正常飞行的安全工作区间。 -
峰值阶段(临界迎角):曲线最高点对应临界迎角,此时达到最大升力系数 $C_{Lmax}$。该状态常用于飞机起飞、着陆等需要大升力的场景。
-
失速阶段:当迎角超过临界迎角后,气流在机翼上表面分离,升力系数急剧下降,飞机进入失速状态,升力不足、操控性下降。
四、关键术语总结
- 零升迎角:升力系数为 0 时对应的迎角
- 临界迎角:升力系数达到最大值的迎角,超过即失速
- $C_{Lmax}$:机翼所能提供的最大升力系数
四、机翼操纵装置与三轴运动原理
4.1 机翼核心操纵装置
4.1.1 副翼
- 安装位置:机翼后缘、靠近翼尖的可动舵面,左右对称布置
- 核心作用:控制飞机绕纵轴的滚转运动
- 操纵原理:
- 左副翼上偏、右副翼下偏→左侧机翼升力减小、右侧升力增大→飞机向左滚转
- 右副翼上偏、左副翼下偏→右侧机翼升力减小、左侧升力增大→飞机向右滚转
【补充考点】副翼反效(逆操纵):高速飞行时,机翼扭转导致副翼偏转产生的力矩与预期相反,是高速飞行的核心风险点。
4.1.2 襟翼
- 安装位置:机翼后缘、靠近翼根的可动舵面
- 核心作用:起飞/着陆低速阶段增升,同时同步增大阻力
- 工作效果:
- 升力增大:襟翼下偏增大机翼弯度与有效面积,大幅提升升力系数,低速下即可获得足够升力
- 阻力增大:襟翼展开增大迎风面积与气流分离,同步提升压差阻力,可缩短着陆滑跑距离
核心考点:带襟翼无人机放下襟翼时,升力与阻力同时增大,最大升力系数提升,失速速度降低。
4.1.3 前缘缝翼
- 安装位置:机翼前缘的可动装置,伸出后与机翼主体形成缝隙
- 核心作用:低速大迎角状态下增升、延缓气流分离,提升失速迎角
- 增升原理:缝翼伸出后,下表面高压高速气流通过缝隙吹向上表面附面层,补充气流能量,推迟气流分离,让机翼可在更大迎角下保持升力,常与襟翼配合用于起降阶段。
4.1.4 扰流板(减速板/减升装置)
- 安装位置:机翼上表面、靠近翼根的可动面板
- 核心作用:减升、增阻,属于减升装置
- 工作原理:扰流板向上抬起,破坏机翼上表面平滑气流,导致气流提前分离,升力大幅下降,同时显著增大飞行阻力
核心考点:常用于着陆时减速、减小升力,防止飞机飘飞;部分无人机也用它辅助滚转控制。
4.2 飞机三轴与对应运动【CAAC必背】
飞机的所有运动均围绕三个互相垂直的轴进行,对应三种核心运动与操纵舵面:
| 轴的名称 | 定义 | 绕轴的运动 | 核心控制舵面 |
|---|---|---|---|
| 纵轴(滚转轴) | 从机头贯穿到机尾,沿机身长度方向 | 滚转(左右倾斜) | 副翼 |
| 横轴(俯仰轴) | 左右贯穿机翼,垂直于纵轴 | 俯仰(抬头/低头) | 升降舵 |
| 立轴(偏航轴) | 从机身顶部贯穿到底部,垂直于水平面 | 偏航(机头左右偏转) | 方向舵 |
补充舵面操纵原理
- 升降舵:安装在水平尾翼后缘,向上偏转→平尾负升力增大→机头上仰;向下偏转→平尾正升力增大→机头下俯
- 方向舵:安装在垂直尾翼后缘,向左偏转→垂尾产生向右气动力→机头左偏;向右偏转→垂尾产生向左气动力→机头右偏
核心操纵规律:
- 操纵副翼时,飞机绕纵轴做滚转运动
- 操纵升降舵时,飞机绕横轴做俯仰运动
- 操纵方向舵时,飞机绕立轴做偏航运动
补充说明:实际飞行中,三轴运动常互相耦合,比如副翼偏转也会带来轻微的偏航趋势(逆偏航效应)。
五、固定翼无人机的飞行阻力
5.1 附面层基础
核心定义:空气流过固定翼无人机时,贴近机体表面、气流速度由主流速度逐渐降低为0的一层空气流动层。
- 核心分类:层流附面层、紊流附面层
知识点补充:层流附面层气流平稳、摩擦阻力小;紊流附面层气流紊乱、摩擦阻力大,但不易发生气流分离。
【补充考点】附面层转捩:层流附面层在一定条件下会转变为紊流附面层,转捩点越靠后,摩擦阻力越小,层流翼型的核心设计目标就是延缓转捩。
易错点:附面层只存在于物体表面,并非整个空间气流;气流速度是逐步降为零,不是突然变为零。
5.2 四大基础阻力类型
-
摩擦阻力【重点】
- 成因:空气黏性与无人机表面摩擦产生
- 影响因素:空气黏性越大、机体表面越粗糙、机体表面积越大 → 摩擦阻力越大
-
压差阻力【重点】
- 成因:机翼前缘流速慢、压力大;后缘气流分离形成涡流、压力小,前后压力差形成的阻力
- 影响因素:与迎风面积、外形形状、气流相对位置密切相关,流线型外形可大幅降低压差阻力
-
诱导阻力【必考】
- 成因:产生升力必然附带的附加阻力,由翼尖涡流、下洗气流产生
- 减阻方法:加装翼梢小翼、增大展弦比、优化机翼梯形比,削弱翼尖涡流、减小下洗速度,降低诱导阻力
-
干扰阻力【重点】
- 成因:机身、机翼、尾翼各部件气流互相干扰产生的额外阻力
- 减阻方法:合理布局部件位置;结合部安装整流包皮,使气流圆滑过渡
易错点:诱导阻力不是摩擦/形状阻力,是升力的副产品;干扰阻力是部件间气流干扰额外产生的阻力,不是单一部件的固有阻力。
5.3 阻力大类划分与速度变化规律
两大核心分类【必背】
- 升致阻力:即诱导阻力,与升力强相关,是产生升力的必然损耗,零升状态下为0
- 零升阻力(寄生阻力):包含摩擦阻力+压差阻力+干扰阻力,与升力无直接关联,只要飞行就存在
速度变化规律【核心考点】
- 诱导阻力:飞行速度越大,阻力越小;低速大迎角时显著增大
- 寄生阻力:飞行速度越大,阻力越大,与速度平方成正比
飞行阶段阻力主导
- 低速起降阶段:诱导阻力占主导
- 高速巡航阶段:寄生阻力占主导
最优临界状态
诱导阻力 = 寄生阻力 → 总阻力最小、升阻比最大,为无人机最优巡航工况
知识点补充:高度越高空气越稀薄,同等飞行速度下,整体阻力会减小。
易错点:低速看诱导阻力,高速看寄生阻力;飞行中永远不存在阻力为0的状态。
5.4 针对性减阻措施【背诵】
- 减小飞机迎风面积、优化流线型外形 → 减小压差阻力
- 合理布局机体结构位置、加装整流包皮 → 减小干扰阻力
- 增大机翼展弦比、加装翼梢小翼 → 减小诱导阻力
- 优化机体表面光滑度、采用层流翼型 → 减小摩擦阻力
六、固定翼无人机低速空气动力性能
6.1 升力核心影响因素
核心影响维度:迎角、气流速度、空气密度、机翼形状、机翼面积
- 飞行高度越低、飞行速度越大、机翼面积越大 → 升力越大
- 机翼形状固定时,升力系数、阻力系数仅由迎角决定
易错点:升力并非只由速度决定,迎角改变也能大幅改变升力大小。
6.2 迎角核心概念【必考】
迎角定义:机翼前进方向(相对气流方向)与翼弦的夹角,又称攻角。
核心关键迎角
- 零升迎角:升力系数为0时对应的迎角
- 对称翼型:零升迎角 = 0°
- 非对称翼型:零升迎角为负值
- 临界迎角(失速迎角):升力系数达到最大值时对应的迎角;超过该迎角即发生失速
升力系数变化规律
迎角增大 → 升力系数先线性增大;接近临界迎角时增速放缓;超过临界迎角后,升力系数骤降。
知识点补充:最大升力系数越大,无人机起飞滑跑所需速度越小,起降性能越好。
【核心易错点】失速不是飞机发动机停转,是迎角超过临界值后气流严重分离、升力急剧下降的现象;失速只与迎角有关,与速度、飞行姿态无关,只要迎角超标,任何速度都会失速。
6.3 失速速度【CAAC必考补充】
失速速度是飞机刚达到临界迎角时对应的飞行速度,是无人机安全飞行的核心边界,核心公式:
$$
V_s = \sqrt{\frac{2W}{\rho S C_{Lmax}}}
$$
其中$W$为无人机重量,$C_{Lmax}$为最大升力系数
影响失速速度的核心因素
- 重量越大,失速速度越大
- 载荷因数越大,失速速度越大
- 放下襟翼,$C_{Lmax}$增大,失速速度减小
- 高原/高温环境,空气密度$\rho$减小,失速速度增大
6.4 阻力系数曲线规律
- 小迎角范围:阻力系数小、增长缓慢
- 大迎角范围:阻力系数快速增大
- 超过临界迎角:阻力系数急剧暴涨
- 阻力系数永远不为0,最小值为零升阻力系数
6.5 升阻比【核心考点】
核心公式:
$$
K = \frac{L}{D} = \frac{C_L}{C_D}
$$
- 升阻比越大:同等升力下阻力越小,无人机气动性能越好、燃油/电能效率越高,航时、航程越长
- 有利迎角:升阻比达到最大值的迎角,此时平飞所需推力最小、飞行效率最高
升阻比变化规律
- 中小迎角范围:迎角增大 → 升阻比持续上升
- 超过有利迎角:升力增速放缓、阻力暴增 → 升阻比快速下降
- 临界迎角附近:气流严重分离 → 升阻比大幅降低
气动极曲线【CAAC难点考点】
气动极曲线是以阻力系数$C_D$为横坐标,升力系数$C_L$为纵坐标绘制的曲线,完整反映无人机全迎角范围的升阻特性:
- 从坐标原点向极曲线作切线,切线斜率=升阻比$K$,切点对应最大升阻比状态,切点迎角即为有利迎角
- 曲线与纵轴交点对应零升迎角
- 曲线最高点对应临界迎角(最大升力系数)
实操考点:空速适度减小时,为保持飞行高度不变,必须增大迎角来维持升力恒定。
易错点:有利迎角 ≠ 临界迎角;有利迎角是飞行效率最高的迎角,临界迎角是升力系数最大的迎角,超过即失速。
七、固定翼无人机重心与操纵力矩
7.1 重心核心定义
重心:无人机各部件重力的合力作用点;考试与实操中,重点关注机身纵轴的前后位置。
【CAAC必考】重心位置表示方法:用重心到平均气动力弦(MAC)前缘的距离 ÷ 平均气动力弦长的百分数表示。
易错点:重心位置仅关注纵轴前后,不关注上下、左右位置。
7.2 三大操纵力矩与对应舵面
- 俯仰力矩:绕横轴,控制飞机抬头/低头 → 升降舵操纵
- 偏航力矩:绕立轴,控制机头左右偏转 → 方向舵操纵
- 滚转力矩:绕纵轴,控制机翼左右倾斜 → 副翼操纵
7.3 重心前后限【补充必考考点】
- 重心前限:纵向操纵性的极限边界。重心过于靠前,升降舵操纵力矩不足,无法拉起机头,着陆阶段易出现无法拉平的风险
- 重心后限:纵向稳定性的极限边界。重心过于靠后,超过气动焦点后,飞机变为纵向静不稳定,姿态极易发散、失控
- 常规固定翼无人机的重心安全范围,通常在平均气动力弦的5%~35%之间
八、固定翼无人机的平衡与稳定性
8.1 飞机平衡核心条件
飞机保持平衡的充要条件:所有外力的合力为0,所有外力矩的合力为0。
8.2 俯仰平衡(纵向平衡)三种状态
- 机翼升力正好作用在重心上,无额外俯仰力矩
- 升力作用点在重心前方 → 水平尾翼产生正升力平衡抬头力矩
- 升力作用点在重心后方 → 水平尾翼产生负升力平衡低头力矩(常规布局主流状态)
8.3 方向平衡(航向平衡/立轴)
- 核心作用:抵抗侧滑、阻止机头无规则左右偏转
- 核心稳定部件:垂直尾翼
- 三种稳定状态:
- 静稳定:出现侧滑后,垂尾产生恢复力矩,机头自动回正
- 静不稳定:侧滑后偏航力矩持续加大,机头越偏越远
- 中性稳定:侧滑后保持新姿态,无恢复趋势、无加剧趋势
8.4 横向平衡(横滚平衡/纵轴)
- 核心作用:维持机翼水平,防止无规则侧倾滚转
- 核心影响因素:上反角、后掠角、上单/下单翼布局、副翼
- 三种稳定状态:静稳定、静不稳定、中性稳定
8.5 静稳定性与动稳定性【补充考点】
- 静稳定性:飞机受扰动偏离原姿态后,是否有自动恢复的趋势,是姿态恢复的前提
- 动稳定性:飞机受扰动后,姿态振荡是否会随时间逐渐衰减,静稳定是动稳定的必要不充分条件
- 【补充】纵向振荡:短周期振荡(俯仰振荡,频率高、阻尼大,易修正)、长周期振荡(浮沉振荡,频率低、阻尼小,不易察觉)
8.6 纵向稳定性核心规律【必考口诀】
- 重心前移 → 纵向安定性增强
- 重心后移 → 纵向安定性减弱
- 常规布局固定翼:气动焦点永远在重心后方
力矩原理
- 机翼升力作用点在重心后方 → 天然产生低头力矩
- 水平尾翼通过负升力压住机头,维持俯仰平衡
重心位置影响
- 重心靠前:恢复力臂变大、低头恢复力矩强,受扰动后自动回正能力强
- 重心靠后:恢复力臂变小、恢复力矩弱,姿态易发散、易失控
背诵口诀:焦点在后,重心在前;重心越靠前,稳定性越强;重心越靠后,稳定性越弱。
易错点:重心仅影响纵向稳定性,不直接影响横向、方向稳定性。
九、三轴阻尼力矩核心考点
9.1 三轴与阻尼对应关系【必背】
- 纵向(俯仰) → 绕横轴
- 横向(滚转) → 绕纵轴
- 方向(偏航) → 绕立轴
9.2 阻尼力矩核心来源【满分考点】
- 纵向阻尼(俯仰):核心产生部件 → 水平尾翼
- 横向阻尼(滚转):核心产生部件 → 机翼
- 方向阻尼(偏航):核心产生部件 → 垂直尾翼
9.3 核心作用原理
阻尼力矩是被动空气阻力力矩,核心作用是抑制飞机姿态摆动,而非直接改平姿态:
- 纵向阻尼:抑制飞机抬头/低头的俯仰摆动
- 横向阻尼:抑制机翼左右倾斜的滚转摆动
- 方向阻尼:抑制机头左右摇摆的偏航摆动
9.4 记忆口诀
纵向俯仰看平尾,横向滚转看机翼,方向偏航看垂尾。
十、迎角与压力中心、气动焦点
10.1 核心结论【考试必背】
- 迎角增大 → 压力中心前移
- 迎角减小 → 压力中心后移
10.2 原理通俗理解
- 机翼升力主要来自上表面前段的负压区
- 大迎角:机翼前段气流加速强、吸力大 → 气动力合力作用点前移
- 小迎角:机翼前段气流平缓,后半段气动力占比提升 → 气动力合力作用点后移
10.3 易混概念核心区分【高频易错】
| 名称 | 核心特性 |
|---|---|
| 压力中心(CP) | 位置随迎角变化前后移动,是气动力合力的作用点 |
| 气动焦点(AC) | 位置固定不变,不随迎角改变,常规翼型约在25%弦长处 |
10.4 记忆口诀
大迎角,压心前;小迎角,压心后。
十一、机翼关键角度与侧滑操纵考点
11.1 机翼关键角度定义【基础考点】
- 后掠角:机翼1/4弦线与机身中心线垂线的夹角,无特殊说明均以此为准
- 安装角:机翼弦线与机身轴线的夹角,为固定角度,不随飞行姿态改变
- 上反角:机翼向上翘起的角度,用于增强横向稳定性
- 迎角:机翼弦线与相对气流的夹角,为动态角度,随飞行姿态实时改变
易错点:
- 安装角是机翼与机身的固定夹角,迎角是机翼与气流的动态夹角,二者完全不同,不可混淆
- 后掠角默认指“1/4弦线后掠角”,不是前缘/后缘后掠角
11.2 横向静稳定性核心来源【修正原知识点偏差】
- 上反角:飞机侧滑时,迎风侧机翼有效迎角增大,升力提升,背风侧迎角减小,升力降低,产生滚转恢复力矩,使飞机自动改平,是横向静稳定性的核心来源
- 后掠角:飞机侧滑时,迎风侧机翼垂直于前缘的有效速度更大,升力提升,背风侧有效速度更小,升力降低,产生滚转恢复力矩,提供横向静稳定性
11.3 侧滑相关核心考点【必考·修正原知识点偏差】
- 侧滑角定义:空速向量与飞机对称面的夹角,空速在对称面左侧为左侧滑,在右侧为右侧滑
- 左侧滑特性:静稳定飞机出现左侧滑时,垂尾左侧迎角增大,产生向右的气动力,使机头自动向左转(回正),对准来流方向
- 单纯副翼转弯侧滑:只压左副翼左转弯时,因逆偏航效应(右副翼下偏阻力增大),机头向右偏转,空速落在飞机对称面左侧,产生左侧滑
易错点:侧滑不是“飞机侧着飞”,核心是空速方向与飞机对称面不重合,分为左侧滑、右侧滑,与转弯方向不一定一致。
11.4 飞行操纵实操考点
- 侧风着陆侧滑修正:向侧风方向压杆带坡度,同时反舵抵制转弯,实现侧滑修正
- 坡度转弯操纵:坡度转弯时配合方向舵→实现协调转弯,可减小转弯半径、消除侧滑
- 侧风着陆升阻比保护:不降低升阻比的方法→用改变航向法
11.5 三轴稳定性核心规律【核心必考】
11.5.1 三轴与稳定性对应关系【必背】
- 绕纵轴转动→对应横向稳定性
- 绕横轴转动→对应纵向稳定性
- 绕立轴转动→对应航向(方向)稳定性
11.5.2 稳定性核心定义
飞机受扰动偏离原飞行姿态,扰动消失后,飞机自动恢复原飞行姿态的能力,而非单纯回到零转角。
11.5.3 稳定性关联关系
- 横向稳定性与航向稳定性:互相耦合,必须匹配适当,否则会出现荷兰滚或螺旋不稳定
- 纵向稳定性与航向稳定性:互相独立,互不影响
11.5.4 稳定性核心影响因素
- 增加水平尾翼面积→增大纵向静稳定性
- 增加垂直尾翼面积→增大方向静稳定性
- 方向稳定性最关键部件:垂直尾翼
- 重心位置仅影响纵向稳定性
- 常规布局气动焦点始终在重心后方;焦点后移→纵向静稳定性增强
易错点:
- 重心不影响横向、航向稳定性,仅改变纵向稳定性
- 垂直尾翼仅影响方向稳定性,水平尾翼仅影响纵向稳定性
11.6 必背三大口诀
- 三轴对应:横轴—纵向俯仰;纵轴—横向滚转;立轴—航向偏航
- 阻尼力矩:纵向平尾、横向机翼、方向垂尾
- 尾翼作用:平尾管纵向,垂尾管航向,机翼管横向
十二、荷兰滚与螺旋不稳定
- 方向安定性过强、横侧稳定性过弱 → 螺旋不稳定
- 横侧安定性过强、方向稳定性过弱 → 荷兰滚(飘摆)
核心原理
- 荷兰滚(飘摆):横向稳、航向弱;飞机出现左右滚转+机头左右偏航的耦合振荡,来回晃动
- 螺旋不稳定:航向稳、横向弱;飞机受扰动倾斜后,滚转与偏航耦合加剧,持续下坠形成螺旋俯冲
补充实操考点
- 荷兰滚改出:用方向舵协调偏航,抑制振荡
- 螺旋不稳定改出:先推杆减小迎角,再改平坡度,最后修正航向
- 设计原则:常规飞机设计会适当牺牲横向稳定性,优先保证方向稳定性,避免荷兰滚(螺旋不稳定发展缓慢,飞行员有充足时间修正)
十三、地面效应
13.1 核心定义
当固定翼无人机距离地面/水面高度 小于等于机翼翼展 时,地面阻挡气流向下扩散,改变机翼气动特性的现象;离地越近,地面效应越明显,高度超过翼展2倍时,地面效应基本消失。
13.2 产生原理
- 正常飞行:机翼下气流向下散开,下洗气流大,诱导阻力高
- 贴近地面:地面形成“挡板”,阻挡气流向下扩散,限制翼尖涡流发展
- 直接效果:机翼下表面压力升高,整体升力增大,诱导阻力显著减小
13.3 地面效应核心变化与实操影响【CAAC必考】
- 同等迎角下,升力系数显著增大,临界迎角减小,飞机易提前失速
- 诱导阻力大幅减小,相同推力下飞行速度增大
- 着陆阶段,贴近地面时升力突增,飞机出现**“飘飞”**现象,导致着陆滑跑距离增长
- 起飞阶段,地面效应可降低离地速度,缩短起飞滑跑距离
十四、翼型三个关键位置
翼型从前到后依次:前缘 → 翼弦 → 后缘
三个核心关键点:
- CG 重心:位置固定不变,常规布局在最前方
- AC 气动焦点:位置固定不变,常规翼型约在25%弦长处
- CP 压力中心:位置随迎角变化前后移动,常规状态在气动焦点后方
核心规律
- 迎角增大 → 压力中心前移
- 迎角减小 → 压力中心后移
十五、诱导阻力考点全解析
15.1 核心定义
诱导阻力是机翼产生升力必须付出的气动代价,是产生升力时附带的额外阻力,零升状态下诱导阻力为0。
15.2 产生原理
- 机翼正常产生升力时,上表面压力低、下表面压力高
- 下表面高压气流从翼尖绕到上表面低压区,形成翼尖涡流
- 翼尖涡流拉扯后方气流形成下洗气流,使升力方向向后倾斜,产生向后的阻力分量,即为诱导阻力
记忆口诀:翼尖涡流 → 下洗气流 → 诱导阻力。
15.3 核心影响因素
- 飞行速度:速度越慢,诱导阻力越大;速度越快,诱导阻力越小
- 机翼升力:升力越大,诱导阻力越大
- 展弦比:机翼展弦比越大(越细长),诱导阻力越小;展弦比越小(越短粗),诱导阻力越大
15.4 核心应用场景
- 起降低速阶段:诱导阻力占总阻力的主导地位
- 高速巡航阶段:寄生阻力占总阻力的主导地位
- 地面效应阶段:贴近地面时,翼尖涡流被抑制,诱导阻力明显减小
15.5 核心减阻方法
- 采用大展弦比机翼
- 机翼翼尖加装翼梢小翼/翼尖帆
- 优化机翼梯形比,采用椭圆翼型平面形状
易错点:诱导阻力不是摩擦阻力,是升力的副产品,与寄生阻力完全不同,零升状态下诱导阻力为0。
十六、下滑有利速度考点版
16.1 核心定义
飞机关闭油门无动力下滑时,下滑距离最远、下滑角最小的飞行速度,称为下滑有利速度,也叫最大升阻比速度。
16.2 核心原理
无动力下滑时,飞机的阻力分为两类:
- 低速范围:诱导阻力占主导
- 高速范围:寄生阻力占主导
当两类阻力总和最小时,升阻比达到最大值,此时对应的速度即为下滑有利速度。
核心公式:无动力下滑时,下滑角$\theta$满足
$$
\tan\theta = \frac{1}{K}
$$
升阻比$K$越大,下滑角越小,滑翔距离越远。
16.3 核心考点
- 核心用途:发动机失效迫降时,保持此速度可获得最远滑翔距离,最大化迫降场地选择范围
- 速度范围:比失速速度大,比正常巡航速度小
- 核心别称:最大升阻比速度、最优滑翔速度
- 补充特性:有利速度仅由飞机气动外形决定,与重量、高度无关;重量增大时,有利真空速同步增大,但升阻比不变
记忆口诀:停车下滑想飞远,保持有利速度最稳妥。
易错点:下滑有利速度不是最慢速度,也不是最快速度,是总阻力最小、升阻比最大、滑翔距离最远的中间速度。—
title: 无人机飞行原理核心知识点(CAAC执照备考)
categories: 无人机
id: 201
tags:
- 无人机
- CAAC
- 飞行原理
abbrlink: dd8b8ec9
date: 2026-04-28 20:38:27
math: true # Butterfly主题Katex渲染必填项,开启本页公式渲染
本文档为CAAC无人机执照考试「飞行原理」模块核心考点整理,覆盖大气基础、流体力学、固定翼气动特性、操纵原理、飞行稳定性等全维度内容,标注必考重点、易错点与记忆口诀,修正知识点偏差,100%适配Hexo Butterfly主题Katex公式渲染,兼顾理论学习与应试备考,可直接复制使用。
一、大气基础知识点
1.1 大气核心特性
1.1.1 空气密度规律
- 空气密度随高度增加而减小
- 空气密度与大气压力成正比,与绝对温度成反比
补充理解:温度越高,空气分子越活跃、体积膨胀,单位体积内质量越小;压力越低,空气越稀薄,两者都会导致密度下降。无人机在高原、高温环境下,需要更高转速/更大油门才能维持升力。
【CAAC补充考点】国际标准大气(ISA)海平面基准:气压101325Pa,温度15℃(288.15K),空气密度1.225kg/m³,为气动计算的标准参考条件。
1.1.2 大气层垂直分层(从低到高)
对流层 → 平流层 → 中间层 → 电离层 → 散逸层
核心考点:
- 对流层高度范围0~11km,核心特征为气温随高度升高而降低(每升高1000m,气温平均下降6.5℃),空气垂直对流强烈,天气现象复杂,绝大多数民用无人机飞行均在对流层内
- 平流层高度范围11~50km,11~20km为同温层,气温恒定-56.5℃,气流平稳、阻力小,民航客机多在平流层底部巡航
1.1.3 气体黏性特性
气体黏性随温度升高而增大
补充理解:空气黏性的本质是分子间的内摩擦阻力。温度越高,空气分子热运动越剧烈,内摩擦阻力越大,会直接增加无人机飞行的摩擦阻力。
【高频易错点】液体黏性随温度升高而减小,与气体规律完全相反,为判断题必考陷阱。
1.2 空气密度计算公式
核心公式(理想气体状态方程):
$$
\rho = \frac{P}{R \cdot T}
$$
| 符号 | 物理含义 | 单位/取值说明 |
|---|---|---|
| $\rho$ | 空气密度 | $kg/m^3$ |
| $P$ | 大气压力 | 帕斯卡(Pa) |
| $T$ | 绝对温度 | 开尔文(K),换算公式:绝对温度 = 摄氏温度 + 273.15 |
| $R$ | 干空气气体常数 | 固定值 $\approx 287\ J/(kg·K)$ |
高频易错点:
- 计算时温度必须使用开尔文(K),严禁直接代入摄氏温度(℃)
- 压力越低、温度越高,空气密度越小,无人机升力性能会显著下降
二、流体力学基础定理
2.1 连续性定理
核心公式(低速定常流动):
$$
A_1 V_1 = A_2 V_2
$$
- $A_1、A_2$:同一流管前后两个截面的面积
- $V_1、V_2$:对应截面处的气流速度
核心结论:低速定常流动的理想流体,气流速度与流管截面积成反比——流管变窄→流速加快;流管变宽→流速减慢。这是机翼上表面气流加速的核心理论基础。
【补充前提】适用条件:低速、定常、不可压缩、连续介质的理想流体。
2.2 伯努利定理
核心公式(同一流管内):
$$
P_0 = \frac{1}{2}\rho V^2 + P
$$
| 符号 | 物理含义 | 核心特性 |
|---|---|---|
| $P_0$ | 总压 | 同一流管内恒定不变 |
| $\frac{1}{2}\rho V^2$ | 动压 | 与气流速度的平方成正比,气流运动产生的压力 |
| $P$ | 静压 | 空气本身的固有压力,与动压此消彼长 |
必考核心结论:同一流管的任意截面上,动压 + 静压 = 总压 = 恒定值
- 动压增大 → 静压减小
- 动压减小 → 静压增大
易错提醒:
- 伯努利定理的适用范围:马赫数Ma<0.3的低速流动,此时空气压缩性影响可忽略,视为不可压缩流体;Ma>0.3时定理不再适用
- 机翼升力的核心来源:上表面流管收窄→流速加快→动压增大→静压降低,上下表面形成压力差,从而产生向上的升力
【补充考点】无人机空速管(皮托管)的核心原理:通过测量总压与静压的差值(动压),计算得到飞行空速。
2.3 两大定理联动逻辑
升力产生的基础逻辑:
- 连续性定理:解释「机翼上表面气流为什么更快」(机翼上表面凸起,流管有效截面积收窄)
- 伯努利定理:解释「流速更快为什么会产生升力」(流速快→动压大→静压小,上下表面形成压力差)
两者结合,构成了机翼产生升力的核心底层逻辑。
三、固定翼无人机机翼核心参数
3.1 机翼平面形状核心参数
3.1.1 机翼面积($S$)
- 定义:机翼在水平面上的投影面积(含机身遮挡部分)
- 核心影响:面积越大,可产生的升力越大,更适配载重、低速、长航时飞行场景
3.1.2 翼展($b$)
- 定义:机翼左右翼尖最外侧之间的直线距离
- 核心作用:描述机翼横向尺寸,是计算展弦比的核心参数
3.1.3 平均几何弦长与平均气动力弦长
平均几何弦长
- 定义:机翼面积与翼展的比值,代表机翼从前缘到后缘的平均宽度
- 计算公式:
$$
\text{平均几何弦长} = \frac{\text{机翼面积}S}{\text{翼展}b}
$$
平均气动力弦长(MAC)【CAAC必考】
- 定义:表征机翼气动力特性的等效弦长,是无人机重心位置、气动焦点位置的基准参考
- 核心应用:无人机重心位置用「重心到MAC前缘的距离 ÷ MAC长度」的百分数表示,为执照考试核心考点
3.1.4 展弦比($A$)
- 定义:描述机翼“细长/短粗”程度的核心参数
- 计算公式:
$$
A = \frac{b^2}{S} = \frac{b}{\text{平均几何弦长}}
$$
| 类型 | 特征 | 适用场景 |
|---|---|---|
| 大展弦比 | 机翼细长 | 滑翔机、长航时测绘无人机,巡航效率高、诱导阻力小 |
| 小展弦比 | 机翼短粗 | 高速无人机、竞速无人机,机动性强、失速迎角大、高速性能好 |
3.1.5 梯形比(尖削比)
- 定义:机翼翼尖弦长 ÷ 翼根弦长(翼根:机翼与机身连接处;翼尖:机翼最外侧)
- 核心影响:
- 比值=1:等弦平直翼
- 比值越小:机翼从翼根到翼尖收束越明显,可优化展向升力分布、降低诱导阻力
3.1.6 后掠角
- 定义:机翼特征线与机身对称面垂线之间的夹角,无特殊说明时,默认指1/4弦线后掠角
- 常见分类:前缘后掠角、1/4弦线后掠角、中弦线后掠角、后缘后掠角
- 正负定义:正角度=机翼后掠(主流设计);负角度=机翼前掠(少见)
| 类型 | 角度范围 | 适用场景 |
|---|---|---|
| 平直翼 | 后掠角<20° | 亚声速、低速长航时无人机 |
| 后掠翼 | 后掠角>25° | 高亚声速、超声速无人机 |
| 三角翼 | 前缘后掠角≈60° | 超声速无尾式固定翼无人机 |
【补充考点】后掠翼的核心作用:提高临界马赫数,延缓激波产生,降低高速飞行的波阻,提升高速飞行性能。
3.1.7 上反角与下反角
- 上反角:机翼基准面与水平面的夹角,机翼从根部向外向上翘起,核心作用是增强横向静稳定性
- 下反角:上反角为负值,机翼从根部向外向下倾斜,核心作用是降低横滚稳定性,提升操控灵活性
3.2 机翼核心气动公式
3.2.1 升力公式
$$
L = \frac{1}{2}\rho V^2 S C_L
$$
3.2.2 阻力公式
$$
D = \frac{1}{2}\rho V^2 S C_D
$$
3.2.3 升力系数公式
$$
C_L = \frac{L}{\frac{1}{2}\rho V^2 S}
$$
| 符号 | 物理含义 |
|---|---|
| $L$ | 升力 |
| $D$ | 阻力 |
| $C_L$ | 升力系数 |
| $C_D$ | 阻力系数 |
| $\rho$ | 空气密度 |
| $V$ | 相对气流速度(飞行速度) |
| $S$ | 机翼面积 |
| $\frac{1}{2}\rho V^2$ | 飞行动压 |
补充说明:翼尖涡流
有限翼展机翼的下翼面压力始终高于上翼面,下表面的高压气流会绕过翼尖流向上表面的低压区,从而形成绕翼尖的空气涡流,是诱导阻力的核心来源。
四、机翼操纵装置与三轴运动原理
4.1 机翼核心操纵装置
4.1.1 副翼
- 安装位置:机翼后缘、靠近翼尖的可动舵面,左右对称布置
- 核心作用:控制飞机绕纵轴的滚转运动
- 操纵原理:
- 左副翼上偏、右副翼下偏→左侧机翼升力减小、右侧升力增大→飞机向左滚转
- 右副翼上偏、左副翼下偏→右侧机翼升力减小、左侧升力增大→飞机向右滚转
【补充考点】副翼反效(逆操纵):高速飞行时,机翼扭转导致副翼偏转产生的力矩与预期相反,是高速飞行的核心风险点。
4.1.2 襟翼
- 安装位置:机翼后缘、靠近翼根的可动舵面
- 核心作用:起飞/着陆低速阶段增升,同时同步增大阻力
- 工作效果:
- 升力增大:襟翼下偏增大机翼弯度与有效面积,大幅提升升力系数,低速下即可获得足够升力
- 阻力增大:襟翼展开增大迎风面积与气流分离,同步提升压差阻力,可缩短着陆滑跑距离
核心考点:带襟翼无人机放下襟翼时,升力与阻力同时增大,最大升力系数提升,失速速度降低。
4.1.3 前缘缝翼
- 安装位置:机翼前缘的可动装置,伸出后与机翼主体形成缝隙
- 核心作用:低速大迎角状态下增升、延缓气流分离,提升失速迎角
- 增升原理:缝翼伸出后,下表面高压高速气流通过缝隙吹向上表面附面层,补充气流能量,推迟气流分离,让机翼可在更大迎角下保持升力,常与襟翼配合用于起降阶段。
4.1.4 扰流板(减速板/减升装置)
- 安装位置:机翼上表面、靠近翼根的可动面板
- 核心作用:减升、增阻,属于减升装置
- 工作原理:扰流板向上抬起,破坏机翼上表面平滑气流,导致气流提前分离,升力大幅下降,同时显著增大飞行阻力
核心考点:常用于着陆时减速、减小升力,防止飞机飘飞;部分无人机也用它辅助滚转控制。
4.2 飞机三轴与对应运动【CAAC必背】
飞机的所有运动均围绕三个互相垂直的轴进行,对应三种核心运动与操纵舵面:
| 轴的名称 | 定义 | 绕轴的运动 | 核心控制舵面 |
|---|---|---|---|
| 纵轴(滚转轴) | 从机头贯穿到机尾,沿机身长度方向 | 滚转(左右倾斜) | 副翼 |
| 横轴(俯仰轴) | 左右贯穿机翼,垂直于纵轴 | 俯仰(抬头/低头) | 升降舵 |
| 立轴(偏航轴) | 从机身顶部贯穿到底部,垂直于水平面 | 偏航(机头左右偏转) | 方向舵 |
补充舵面操纵原理
- 升降舵:安装在水平尾翼后缘,向上偏转→平尾负升力增大→机头上仰;向下偏转→平尾正升力增大→机头下俯
- 方向舵:安装在垂直尾翼后缘,向左偏转→垂尾产生向右气动力→机头左偏;向右偏转→垂尾产生向左气动力→机头右偏
核心操纵规律:
- 操纵副翼时,飞机绕纵轴做滚转运动
- 操纵升降舵时,飞机绕横轴做俯仰运动
- 操纵方向舵时,飞机绕立轴做偏航运动
补充说明:实际飞行中,三轴运动常互相耦合,比如副翼偏转也会带来轻微的偏航趋势(逆偏航效应)。
五、固定翼无人机的飞行阻力
5.1 附面层基础
核心定义:空气流过固定翼无人机时,贴近机体表面、气流速度由主流速度逐渐降低为0的一层空气流动层。
- 核心分类:层流附面层、紊流附面层
知识点补充:层流附面层气流平稳、摩擦阻力小;紊流附面层气流紊乱、摩擦阻力大,但不易发生气流分离。
【补充考点】附面层转捩:层流附面层在一定条件下会转变为紊流附面层,转捩点越靠后,摩擦阻力越小,层流翼型的核心设计目标就是延缓转捩。
易错点:附面层只存在于物体表面,并非整个空间气流;气流速度是逐步降为零,不是突然变为零。
5.2 四大基础阻力类型
-
摩擦阻力【重点】
- 成因:空气黏性与无人机表面摩擦产生
- 影响因素:空气黏性越大、机体表面越粗糙、机体表面积越大 → 摩擦阻力越大
-
压差阻力【重点】
- 成因:机翼前缘流速慢、压力大;后缘气流分离形成涡流、压力小,前后压力差形成的阻力
- 影响因素:与迎风面积、外形形状、气流相对位置密切相关,流线型外形可大幅降低压差阻力
-
诱导阻力【必考】
- 成因:产生升力必然附带的附加阻力,由翼尖涡流、下洗气流产生
- 减阻方法:加装翼梢小翼、增大展弦比、优化机翼梯形比,削弱翼尖涡流、减小下洗速度,降低诱导阻力
-
干扰阻力【重点】
- 成因:机身、机翼、尾翼各部件气流互相干扰产生的额外阻力
- 减阻方法:合理布局部件位置;结合部安装整流包皮,使气流圆滑过渡
易错点:诱导阻力不是摩擦/形状阻力,是升力的副产品;干扰阻力是部件间气流干扰额外产生的阻力,不是单一部件的固有阻力。
5.3 阻力大类划分与速度变化规律
两大核心分类【必背】
- 升致阻力:即诱导阻力,与升力强相关,是产生升力的必然损耗,零升状态下为0
- 零升阻力(寄生阻力):包含摩擦阻力+压差阻力+干扰阻力,与升力无直接关联,只要飞行就存在
速度变化规律【核心考点】
- 诱导阻力:飞行速度越大,阻力越小;低速大迎角时显著增大
- 寄生阻力:飞行速度越大,阻力越大,与速度平方成正比
飞行阶段阻力主导
- 低速起降阶段:诱导阻力占主导
- 高速巡航阶段:寄生阻力占主导
最优临界状态
诱导阻力 = 寄生阻力 → 总阻力最小、升阻比最大,为无人机最优巡航工况
知识点补充:高度越高空气越稀薄,同等飞行速度下,整体阻力会减小。
易错点:低速看诱导阻力,高速看寄生阻力;飞行中永远不存在阻力为0的状态。
5.4 针对性减阻措施【背诵】
- 减小飞机迎风面积、优化流线型外形 → 减小压差阻力
- 合理布局机体结构位置、加装整流包皮 → 减小干扰阻力
- 增大机翼展弦比、加装翼梢小翼 → 减小诱导阻力
- 优化机体表面光滑度、采用层流翼型 → 减小摩擦阻力
六、固定翼无人机低速空气动力性能
6.1 升力核心影响因素
核心影响维度:迎角、气流速度、空气密度、机翼形状、机翼面积
- 飞行高度越低、飞行速度越大、机翼面积越大 → 升力越大
- 机翼形状固定时,升力系数、阻力系数仅由迎角决定
易错点:升力并非只由速度决定,迎角改变也能大幅改变升力大小。
6.2 迎角核心概念【必考】
迎角定义:机翼前进方向(相对气流方向)与翼弦的夹角,又称攻角。
核心关键迎角
- 零升迎角:升力系数为0时对应的迎角
- 对称翼型:零升迎角 = 0°
- 非对称翼型:零升迎角为负值
- 临界迎角(失速迎角):升力系数达到最大值时对应的迎角;超过该迎角即发生失速
升力系数变化规律
迎角增大 → 升力系数先线性增大;接近临界迎角时增速放缓;超过临界迎角后,升力系数骤降。
知识点补充:最大升力系数越大,无人机起飞滑跑所需速度越小,起降性能越好。
【核心易错点】失速不是飞机发动机停转,是迎角超过临界值后气流严重分离、升力急剧下降的现象;失速只与迎角有关,与速度、飞行姿态无关,只要迎角超标,任何速度都会失速。
6.3 失速速度【CAAC必考补充】
失速速度是飞机刚达到临界迎角时对应的飞行速度,是无人机安全飞行的核心边界,核心公式:
$$
V_s = \sqrt{\frac{2W}{\rho S C_{Lmax}}}
$$
其中$W$为无人机重量,$C_{Lmax}$为最大升力系数
影响失速速度的核心因素
- 重量越大,失速速度越大
- 载荷因数越大,失速速度越大
- 放下襟翼,$C_{Lmax}$增大,失速速度减小
- 高原/高温环境,空气密度$\rho$减小,失速速度增大
6.4 阻力系数曲线规律
- 小迎角范围:阻力系数小、增长缓慢
- 大迎角范围:阻力系数快速增大
- 超过临界迎角:阻力系数急剧暴涨
- 阻力系数永远不为0,最小值为零升阻力系数
6.5 升阻比【核心考点】
核心公式:
$$
K = \frac{L}{D} = \frac{C_L}{C_D}
$$
- 升阻比越大:同等升力下阻力越小,无人机气动性能越好、燃油/电能效率越高,航时、航程越长
- 有利迎角:升阻比达到最大值的迎角,此时平飞所需推力最小、飞行效率最高
升阻比变化规律
- 中小迎角范围:迎角增大 → 升阻比持续上升
- 超过有利迎角:升力增速放缓、阻力暴增 → 升阻比快速下降
- 临界迎角附近:气流严重分离 → 升阻比大幅降低
气动极曲线【CAAC难点考点】
气动极曲线是以阻力系数$C_D$为横坐标,升力系数$C_L$为纵坐标绘制的曲线,完整反映无人机全迎角范围的升阻特性:
- 从坐标原点向极曲线作切线,切线斜率=升阻比$K$,切点对应最大升阻比状态,切点迎角即为有利迎角
- 曲线与纵轴交点对应零升迎角
- 曲线最高点对应临界迎角(最大升力系数)
实操考点:空速适度减小时,为保持飞行高度不变,必须增大迎角来维持升力恒定。
易错点:有利迎角 ≠ 临界迎角;有利迎角是飞行效率最高的迎角,临界迎角是升力系数最大的迎角,超过即失速。
七、固定翼无人机重心与操纵力矩
7.1 重心核心定义
重心:无人机各部件重力的合力作用点;考试与实操中,重点关注机身纵轴的前后位置。
【CAAC必考】重心位置表示方法:用重心到平均气动力弦(MAC)前缘的距离 ÷ 平均气动力弦长的百分数表示。
易错点:重心位置仅关注纵轴前后,不关注上下、左右位置。
7.2 三大操纵力矩与对应舵面
- 俯仰力矩:绕横轴,控制飞机抬头/低头 → 升降舵操纵
- 偏航力矩:绕立轴,控制机头左右偏转 → 方向舵操纵
- 滚转力矩:绕纵轴,控制机翼左右倾斜 → 副翼操纵
7.3 重心前后限【补充必考考点】
- 重心前限:纵向操纵性的极限边界。重心过于靠前,升降舵操纵力矩不足,无法拉起机头,着陆阶段易出现无法拉平的风险
- 重心后限:纵向稳定性的极限边界。重心过于靠后,超过气动焦点后,飞机变为纵向静不稳定,姿态极易发散、失控
- 常规固定翼无人机的重心安全范围,通常在平均气动力弦的5%~35%之间
八、固定翼无人机的平衡与稳定性
8.1 飞机平衡核心条件
飞机保持平衡的充要条件:所有外力的合力为0,所有外力矩的合力为0。
8.2 俯仰平衡(纵向平衡)三种状态
- 机翼升力正好作用在重心上,无额外俯仰力矩
- 升力作用点在重心前方 → 水平尾翼产生正升力平衡抬头力矩
- 升力作用点在重心后方 → 水平尾翼产生负升力平衡低头力矩(常规布局主流状态)
8.3 方向平衡(航向平衡/立轴)
- 核心作用:抵抗侧滑、阻止机头无规则左右偏转
- 核心稳定部件:垂直尾翼
- 三种稳定状态:
- 静稳定:出现侧滑后,垂尾产生恢复力矩,机头自动回正
- 静不稳定:侧滑后偏航力矩持续加大,机头越偏越远
- 中性稳定:侧滑后保持新姿态,无恢复趋势、无加剧趋势
8.4 横向平衡(横滚平衡/纵轴)
- 核心作用:维持机翼水平,防止无规则侧倾滚转
- 核心影响因素:上反角、后掠角、上单/下单翼布局、副翼
- 三种稳定状态:静稳定、静不稳定、中性稳定
8.5 静稳定性与动稳定性【补充考点】
- 静稳定性:飞机受扰动偏离原姿态后,是否有自动恢复的趋势,是姿态恢复的前提
- 动稳定性:飞机受扰动后,姿态振荡是否会随时间逐渐衰减,静稳定是动稳定的必要不充分条件
- 【补充】纵向振荡:短周期振荡(俯仰振荡,频率高、阻尼大,易修正)、长周期振荡(浮沉振荡,频率低、阻尼小,不易察觉)
8.6 纵向稳定性核心规律【必考口诀】
- 重心前移 → 纵向安定性增强
- 重心后移 → 纵向安定性减弱
- 常规布局固定翼:气动焦点永远在重心后方
力矩原理
- 机翼升力作用点在重心后方 → 天然产生低头力矩
- 水平尾翼通过负升力压住机头,维持俯仰平衡
重心位置影响
- 重心靠前:恢复力臂变大、低头恢复力矩强,受扰动后自动回正能力强
- 重心靠后:恢复力臂变小、恢复力矩弱,姿态易发散、易失控
背诵口诀:焦点在后,重心在前;重心越靠前,稳定性越强;重心越靠后,稳定性越弱。
易错点:重心仅影响纵向稳定性,不直接影响横向、方向稳定性。
九、三轴阻尼力矩核心考点
9.1 三轴与阻尼对应关系【必背】
- 纵向(俯仰) → 绕横轴
- 横向(滚转) → 绕纵轴
- 方向(偏航) → 绕立轴
9.2 阻尼力矩核心来源【满分考点】
- 纵向阻尼(俯仰):核心产生部件 → 水平尾翼
- 横向阻尼(滚转):核心产生部件 → 机翼
- 方向阻尼(偏航):核心产生部件 → 垂直尾翼
9.3 核心作用原理
阻尼力矩是被动空气阻力力矩,核心作用是抑制飞机姿态摆动,而非直接改平姿态:
- 纵向阻尼:抑制飞机抬头/低头的俯仰摆动
- 横向阻尼:抑制机翼左右倾斜的滚转摆动
- 方向阻尼:抑制机头左右摇摆的偏航摆动
9.4 记忆口诀
纵向俯仰看平尾,横向滚转看机翼,方向偏航看垂尾。
十、迎角与压力中心、气动焦点
10.1 核心结论【考试必背】
- 迎角增大 → 压力中心前移
- 迎角减小 → 压力中心后移
10.2 原理通俗理解
- 机翼升力主要来自上表面前段的负压区
- 大迎角:机翼前段气流加速强、吸力大 → 气动力合力作用点前移
- 小迎角:机翼前段气流平缓,后半段气动力占比提升 → 气动力合力作用点后移
10.3 易混概念核心区分【高频易错】
| 名称 | 核心特性 |
|---|---|
| 压力中心(CP) | 位置随迎角变化前后移动,是气动力合力的作用点 |
| 气动焦点(AC) | 位置固定不变,不随迎角改变,常规翼型约在25%弦长处 |
10.4 记忆口诀
大迎角,压心前;小迎角,压心后。
十一、机翼关键角度与侧滑操纵考点
11.1 机翼关键角度定义【基础考点】
- 后掠角:机翼1/4弦线与机身中心线垂线的夹角,无特殊说明均以此为准
- 安装角:机翼弦线与机身轴线的夹角,为固定角度,不随飞行姿态改变
- 上反角:机翼向上翘起的角度,用于增强横向稳定性
- 迎角:机翼弦线与相对气流的夹角,为动态角度,随飞行姿态实时改变
易错点:
- 安装角是机翼与机身的固定夹角,迎角是机翼与气流的动态夹角,二者完全不同,不可混淆
- 后掠角默认指“1/4弦线后掠角”,不是前缘/后缘后掠角
11.2 横向静稳定性核心来源【修正原知识点偏差】
- 上反角:飞机侧滑时,迎风侧机翼有效迎角增大,升力提升,背风侧迎角减小,升力降低,产生滚转恢复力矩,使飞机自动改平,是横向静稳定性的核心来源
- 后掠角:飞机侧滑时,迎风侧机翼垂直于前缘的有效速度更大,升力提升,背风侧有效速度更小,升力降低,产生滚转恢复力矩,提供横向静稳定性
11.3 侧滑相关核心考点【必考·修正原知识点偏差】
- 侧滑角定义:空速向量与飞机对称面的夹角,空速在对称面左侧为左侧滑,在右侧为右侧滑
- 左侧滑特性:静稳定飞机出现左侧滑时,垂尾左侧迎角增大,产生向右的气动力,使机头自动向左转(回正),对准来流方向
- 单纯副翼转弯侧滑:只压左副翼左转弯时,因逆偏航效应(右副翼下偏阻力增大),机头向右偏转,空速落在飞机对称面左侧,产生左侧滑
易错点:侧滑不是“飞机侧着飞”,核心是空速方向与飞机对称面不重合,分为左侧滑、右侧滑,与转弯方向不一定一致。
11.4 飞行操纵实操考点
- 侧风着陆侧滑修正:向侧风方向压杆带坡度,同时反舵抵制转弯,实现侧滑修正
- 坡度转弯操纵:坡度转弯时配合方向舵→实现协调转弯,可减小转弯半径、消除侧滑
- 侧风着陆升阻比保护:不降低升阻比的方法→用改变航向法
11.5 三轴稳定性核心规律【核心必考】
11.5.1 三轴与稳定性对应关系【必背】
- 绕纵轴转动→对应横向稳定性
- 绕横轴转动→对应纵向稳定性
- 绕立轴转动→对应航向(方向)稳定性
11.5.2 稳定性核心定义
飞机受扰动偏离原飞行姿态,扰动消失后,飞机自动恢复原飞行姿态的能力,而非单纯回到零转角。
11.5.3 稳定性关联关系
- 横向稳定性与航向稳定性:互相耦合,必须匹配适当,否则会出现荷兰滚或螺旋不稳定
- 纵向稳定性与航向稳定性:互相独立,互不影响
11.5.4 稳定性核心影响因素
- 增加水平尾翼面积→增大纵向静稳定性
- 增加垂直尾翼面积→增大方向静稳定性
- 方向稳定性最关键部件:垂直尾翼
- 重心位置仅影响纵向稳定性
- 常规布局气动焦点始终在重心后方;焦点后移→纵向静稳定性增强
易错点:
- 重心不影响横向、航向稳定性,仅改变纵向稳定性
- 垂直尾翼仅影响方向稳定性,水平尾翼仅影响纵向稳定性
11.6 必背三大口诀
- 三轴对应:横轴—纵向俯仰;纵轴—横向滚转;立轴—航向偏航
- 阻尼力矩:纵向平尾、横向机翼、方向垂尾
- 尾翼作用:平尾管纵向,垂尾管航向,机翼管横向
十二、荷兰滚与螺旋不稳定
- 方向安定性过强、横侧稳定性过弱 → 螺旋不稳定
- 横侧安定性过强、方向稳定性过弱 → 荷兰滚(飘摆)
核心原理
- 荷兰滚(飘摆):横向稳、航向弱;飞机出现左右滚转+机头左右偏航的耦合振荡,来回晃动
- 螺旋不稳定:航向稳、横向弱;飞机受扰动倾斜后,滚转与偏航耦合加剧,持续下坠形成螺旋俯冲
补充实操考点
- 荷兰滚改出:用方向舵协调偏航,抑制振荡
- 螺旋不稳定改出:先推杆减小迎角,再改平坡度,最后修正航向
- 设计原则:常规飞机设计会适当牺牲横向稳定性,优先保证方向稳定性,避免荷兰滚(螺旋不稳定发展缓慢,飞行员有充足时间修正)
十三、地面效应
13.1 核心定义
当固定翼无人机距离地面/水面高度 小于等于机翼翼展 时,地面阻挡气流向下扩散,改变机翼气动特性的现象;离地越近,地面效应越明显,高度超过翼展2倍时,地面效应基本消失。
13.2 产生原理
- 正常飞行:机翼下气流向下散开,下洗气流大,诱导阻力高
- 贴近地面:地面形成“挡板”,阻挡气流向下扩散,限制翼尖涡流发展
- 直接效果:机翼下表面压力升高,整体升力增大,诱导阻力显著减小
13.3 地面效应核心变化与实操影响【CAAC必考】
- 同等迎角下,升力系数显著增大,临界迎角减小,飞机易提前失速
- 诱导阻力大幅减小,相同推力下飞行速度增大
- 着陆阶段,贴近地面时升力突增,飞机出现**“飘飞”**现象,导致着陆滑跑距离增长
- 起飞阶段,地面效应可降低离地速度,缩短起飞滑跑距离
十四、翼型三个关键位置
翼型从前到后依次:前缘 → 翼弦 → 后缘
三个核心关键点:
- CG 重心:位置固定不变,常规布局在最前方
- AC 气动焦点:位置固定不变,常规翼型约在25%弦长处
- CP 压力中心:位置随迎角变化前后移动,常规状态在气动焦点后方
核心规律
- 迎角增大 → 压力中心前移
- 迎角减小 → 压力中心后移
十五、诱导阻力考点全解析
15.1 核心定义
诱导阻力是机翼产生升力必须付出的气动代价,是产生升力时附带的额外阻力,零升状态下诱导阻力为0。
15.2 产生原理
- 机翼正常产生升力时,上表面压力低、下表面压力高
- 下表面高压气流从翼尖绕到上表面低压区,形成翼尖涡流
- 翼尖涡流拉扯后方气流形成下洗气流,使升力方向向后倾斜,产生向后的阻力分量,即为诱导阻力
记忆口诀:翼尖涡流 → 下洗气流 → 诱导阻力。
15.3 核心影响因素
- 飞行速度:速度越慢,诱导阻力越大;速度越快,诱导阻力越小
- 机翼升力:升力越大,诱导阻力越大
- 展弦比:机翼展弦比越大(越细长),诱导阻力越小;展弦比越小(越短粗),诱导阻力越大
15.4 核心应用场景
- 起降低速阶段:诱导阻力占总阻力的主导地位
- 高速巡航阶段:寄生阻力占总阻力的主导地位
- 地面效应阶段:贴近地面时,翼尖涡流被抑制,诱导阻力明显减小
15.5 核心减阻方法
- 采用大展弦比机翼
- 机翼翼尖加装翼梢小翼/翼尖帆
- 优化机翼梯形比,采用椭圆翼型平面形状
易错点:诱导阻力不是摩擦阻力,是升力的副产品,与寄生阻力完全不同,零升状态下诱导阻力为0。
十六、下滑有利速度考点版
16.1 核心定义
飞机关闭油门无动力下滑时,下滑距离最远、下滑角最小的飞行速度,称为下滑有利速度,也叫最大升阻比速度。
16.2 核心原理
无动力下滑时,飞机的阻力分为两类:
- 低速范围:诱导阻力占主导
- 高速范围:寄生阻力占主导
当两类阻力总和最小时,升阻比达到最大值,此时对应的速度即为下滑有利速度。
核心公式:无动力下滑时,下滑角$\theta$满足
$$
\tan\theta = \frac{1}{K}
$$
升阻比$K$越大,下滑角越小,滑翔距离越远。
16.3 核心考点
- 核心用途:发动机失效迫降时,保持此速度可获得最远滑翔距离,最大化迫降场地选择范围
- 速度范围:比失速速度大,比正常巡航速度小
- 核心别称:最大升阻比速度、最优滑翔速度
- 补充特性:有利速度仅由飞机气动外形决定,与重量、高度无关;重量增大时,有利真空速同步增大,但升阻比不变
记忆口诀:停车下滑想飞远,保持有利速度最稳妥。
易错点:下滑有利速度不是最慢速度,也不是最快速度,是总阻力最小、升阻比最大、滑翔距离最远的中间速度。